*本文来自轩辕实验室杨杰森的研究成果和学习笔记
01-概述
对无人机(UAV)的一个重大安全威胁是通过GPS欺骗来捕获它,其中攻击者操纵无人机的GPS信号来捕获它,本文以无人机在定点巡航任务中的飞行安全为主要研究课题,即无人机根据GPS定位功能沿着预先选择的点飞行,本文介绍了一种反欺骗模型来减轻GPS欺骗攻击对无人机任务安全的影响,该模型采用线性回归(LR)对无人机到达目的地的最优路径进行预测和建模。在此基础上,提出了一种减少GPS欺骗攻击影响的对策机制,对抗是基于模型的渐进式检测机制。为了更好地保证无人机的飞行安全,该模型为欺骗信号提供了一种以上的检测方案,提高了无人机对欺骗信号检测的灵敏度。为了更好地证明所提出的LR反欺骗模型,提出了一个动态的斯塔克尔伯格游戏来模拟GPS欺骗者与无人机之间的交互作用,特别是对于GPS欺骗者,值得一提的是,实验模拟了无人机在指定路径的任务环境中被GPS欺骗信号欺骗的场景。特别是采用LR反欺骗模型的无人机,作为本游戏的领导者,在检测到GPS欺骗者的攻击时,根据欺骗者的攻击策略动态调整其响应策略。仿真结果表明,该方法可以在不增加无人机硬件成本的情况下,有效地提高无人机抵抗GPS欺骗的能力,且易于实现。此外,本文还尝试在模型的轨迹预测模块中使用长期短期记忆(LSTM)网络,实验结果表明,所提出的LR反欺骗模型在预测精度方面远优于LSTM。
本文的亮点在于,以往的工作仅停留于检测GPS欺骗,而本文提出的框架不仅支持无人机检测GPS欺骗攻击,而且可以引导无人机在检测到攻击并偏离路线后返回到之前的飞行路径,这将使无人机能够避免被捕获并完成其任务。
02-LR反欺骗模型
2.1线性回归分析
回归分析是一种处理变量间依赖性的统计方法。它是数理统计学中应用最广泛的方法之一,最小二乘回归分析是最典型的线性回归算法。回归分析是基于观测数据,建立两个或多个变量之间的定量关系,以分析数据的固有规律。根据自变量数,可分为单变量回归分析和多元回归分析;根据自变量与因变量的关系,可分为线性回归分析和非线性回归分析。回归分析是一种常用于预测分析的预测建模技术。
本文采用单变量线性回归分析方法,建立了一个随时间戳变化的无人机定位区间,以预测无人机的任务轨迹。
上式中y为因变量,a为常数项,b为回归系数,x为自变量,ε为随机误差项,反映了除了x与y之间的线性关系外随机因素对y的影响。
假设回归模型中的随机误差项ε是一个期望值为0的随机变量,且服从正态分布,则对于给定的x值,y的期望值为
总体回归参数a和b未知,需要用样本数据进行估计,对于所选样本,将模型中的回归参数a和b替换为样本统计量 和 ,得到线性回归中估计的回归方程,得到样本回归方程
其中 是y的期望, 为样本回归方程的常数项, 为样本回归系数,对于样本量为N的数据集,用最小二乘法估计的 和 的值为
2.2LR反欺骗模型的工作流程
基于本文提出的LR模型,在决策层面上对无人机的飞行轨迹预测值和GPS接收机的定位值进行融合,可以快速检测无人机的GPS欺骗。所提出的LR反欺骗模型的工作流程图如图1所示。
在模型中进行单步欺骗检测和多步欺骗检测。差异在于单步或多步的预测值与当前GPS定位数据的差异,以确定无人机被GPS欺骗的状态,若经纬度偏差小于相应的安全阈值,则确定未检测到GPS欺骗;如果经度或纬度之差大于相应的E(安全阈值),则确定目标无人机已被欺骗。利用预测的定位数据作为当前的定位信息,指导无人机飞行。
单步欺骗检测:对于每个时间间隔,首先蒋当前时间的修正值、时间戳和当前GPS时间戳输入线性回归轨迹预测模型,输出预测当前时间的定位信息。
多步欺骗检测:对于每个时间间隔,首先将最后m次的校正值、时间戳和当前GPS时间戳输入到线性回归轨迹预测模型中,输出预测的当前时间的定位信息。
引入多步检测的原因是,将欺骗信号设置在一个合理的误差范围内,以提高其可信度。特别地,我们设置了一个滑动窗口来存储m个历史记录的校正数据,用于多步预测,对于每个多步预测,将前m个时间的校正数据与预测数据进行比较,以检测欺骗,然后,该数据被消除,窗口中的数据被向前推进一步,最后,将该时间的校正数据保存在m−1定位中。图1中参数的物理意义如表1所示。
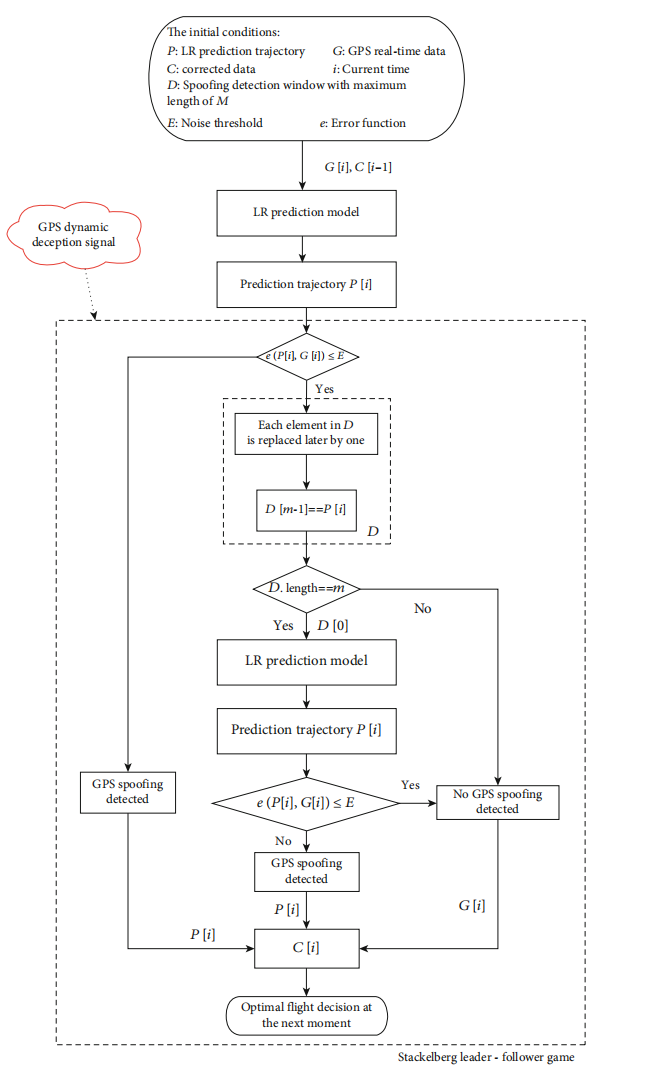
图1:LR反欺骗模型的工作流程图。

表1:LR反欺骗模型工作流程图中参数的物理意义。
2.3误差阈值设置
给定一组无人机正常固定点巡航的连续历史轨迹,, ,每个轨迹点都由一个元组表示,该元组包含三个元素:时间戳、纬度和经度。然后,我们可以提取两个相邻时间戳范围内的经纬度偏差:
以 最大值的1.5倍作为经度的偏差阈值E,纬度采用相同的设置,这种设置是考虑到实际飞行中物理环境的干扰。
03-攻防游戏
为了尽可能接近真实场景,本文以四旋翼无人机作为研究对象,利用LR反欺骗模型设计了一个基于领导-跟随者博弈论模拟GPS动态欺骗信号发生器与无人机之间的攻击防御游戏。
3.1斯塔克尔伯格领导追随游戏
领导者-追随者游戏的概念最初是由德国经济学家海因里希·冯·斯塔克尔伯格在1934年提出的,在斯塔克尔伯格的领导者-追随者游戏中,在领导者做出决定后,追随者对领导者的决定做出最佳的反应,最后,领导者根据追随者的决定做出最有利的决定。主从属博弈属于非对称博弈的范畴,博弈中参与者的定位不平等,追随者的策略选择取决于领导者的策略选择。这一观点与无人机任务中的LR防御模型和GPS动态欺骗信号发生器中的定位相一致。
3.2领导追随游戏场景
在攻击防御游戏中,使用LR反欺骗模型的无人机是领导者,称为LR防御者,模拟的GPS动态欺骗信号发生器是跟随者,称为GPS欺骗者。在规划游戏中,每个玩家将选择一个策略,并采取行动来控制无人机在每个时间步长中的定位。通过这种方式,两个玩家都可以观察到无人机的初始位置和它们在当前时间步长中的后续位置。此外,游戏是基于完整信息的假设,即两个玩家都拥有对手的完整信息。我们的工作包括三轮游戏,七个步骤:
(1)LR防御者:接受两点固定航行任务
(2)GPS欺骗者:根据无人机当前的定位和预期的欺骗定位,计算一个欺骗轨迹(一组GPS轨迹数据),每200ms发送一个欺骗信号
(3)LR防御者:每200ms计算一次当前预测轨迹点与GPS实时定位数据之间的偏差。如果偏差大于预测的安全阈值,下次删除GPS实时数据,利用LR预测的轨迹点引导无人机完成飞行任务;如果偏差小于安全阈值,则继续接收GPS实时数据进行轨迹定位
(4)GPS欺骗者:如果无人机的飞行轨迹与预期的欺骗轨迹不一致,则调整GPS欺骗轨迹的轨迹点信息,直到每两个轨迹点之间的数据偏差小于无人机预测模块的安全阈值
(5)LR防御者:每次计算当前预测轨迹点与GPS实时定位数据之间的偏差。如果连续5次的偏差小于预测模块的安全阈值,则计算LR预测的第5次轨迹点数据与当前GPS实时数据之间的偏差。如果仍低于安全阈值,飞行将根据GPS实时数据继续飞行。如果大于安全阈值,下次将拆除GPS欺骗器,利用实时数据利用LR预测轨迹点指导无人机飞行
(6)GPS欺骗者:多次观察无人机的飞行轨迹,如果不遵循预期的欺骗轨迹,就放弃欺骗
(7)LR防御者:在接收到预测的轨迹值后,同步计算在相邻时间(如n时间和n+1时间)接收到的GPS信号的经度/纬度变化,由于欺骗信号的产生是基于恒定的偏差,因此相邻时间的经纬度变化也是固定的,当 时,可以确定目前不存在GPS欺骗。然后,无人机停止使用预测值,并开始使用当前接收到的GPS信号来定位并继续完成任务。
在这个游戏中,无人机的预期运动状态如图2所示。
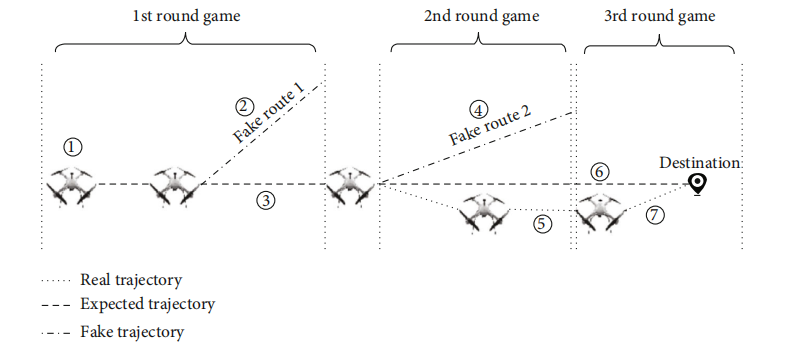
图2:领导追随游戏中,无人机的预期运动状态。
04-仿真与评估
4.1实验配置
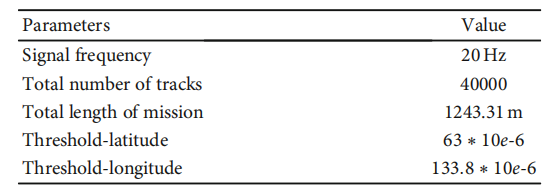
表2:收集的数据集参数。
该实验是基于由jMAVSim和QGround-Control组成的无人机仿真平台。jMAVSim是一个简单而轻量级的多转子模拟器。它直接连接到自动驾驶仪的环内硬件(HITL,通过串行)或环内软件(SITL,通过UDP)实例。Q地面控制是模拟地面控制站。它为任何启用mavlink的无人机提供完整的飞行控制和任务计划,并收集飞行日志。飞行日志包含各种传感器收集的数据和飞行期间的一些系统输出数据。我们从飞行日志中提取与gps相关的数据(时间戳、经度和纬度)来组成训练数据集。在实验中,利用预设的定点巡航飞行任务在无人机仿真环境下生成了LR反欺骗模型的训练数据集。该数据集的相关参数如表2所示。
4.2欺骗场景验证
本文在验证LR反欺骗模型之前,首先验证了欺骗场景的有效性。
4.2.1欺骗场景构建
为了更好地模拟真实情况,我们构建了一个依赖于我们设计的模拟GPS动态欺骗信号发生器的仿真欺骗场景。我们期望在这个场景中实现无人机的诱饵捕获。在这种情况下,欺骗手段是通过观察目标飞机进入稳定飞行状态后的轨迹变化,动态生成一组轨迹点信号来欺骗无人机。欺骗轨迹的设置是基于无人机GPS本身的噪声范围。具体的实现细节如下。
首先,我们可以通过中间插值方法计算无人机正常飞行中GPS数据的噪声阈值。在此背景上,随机生成一组欺骗性轨迹。为了更快地捕获目标,两个相邻的GPS变化值大于噪声阈值的上限。当无人机没有按照预期的欺骗轨迹飞行时,推测无人机可能对变化较大的信号具有一定的检测和滤波能力。基于采集的目的,根据误差阈值生成一个新的欺骗轨迹,使两个相邻矩的GPS变化值在噪声阈值范围内,提高了欺骗信号的可信度。最简单的方法是在下次向GPS欺骗数据添加一个固定的增量。
4.2.2有效性验证
图3显示了无人机在没有干扰和欺骗的情况下完成给定飞行任务的轨迹图是基于地面坐标系,横坐标信息和纵坐标分别表示纬度信息和经度信息。图4为QGC中任务路线的可视化表达式。如您所见,H表示无人机的主点,1表示目的地。图5显示了受我们在无人机任务环境中发送的GPS欺骗信号影响的目标的实验结果。

图3:给定飞行任务的飞行轨迹图基于地面坐标系,横坐标和纵坐标分别表示纬度信息和经度信息。

图4:在QGC中,任务路线的可视化表达。
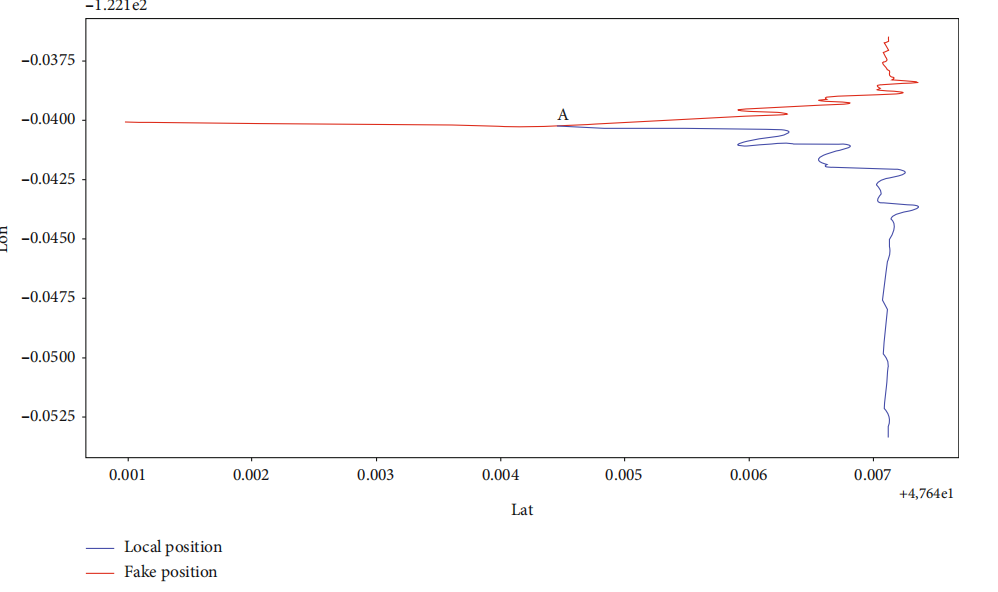
图5:红线表示GPS欺骗信号在捕获过程中的动态变化轨迹,蓝线表示目标飞机在任务过程中的真实位置,即真实的飞行路径。
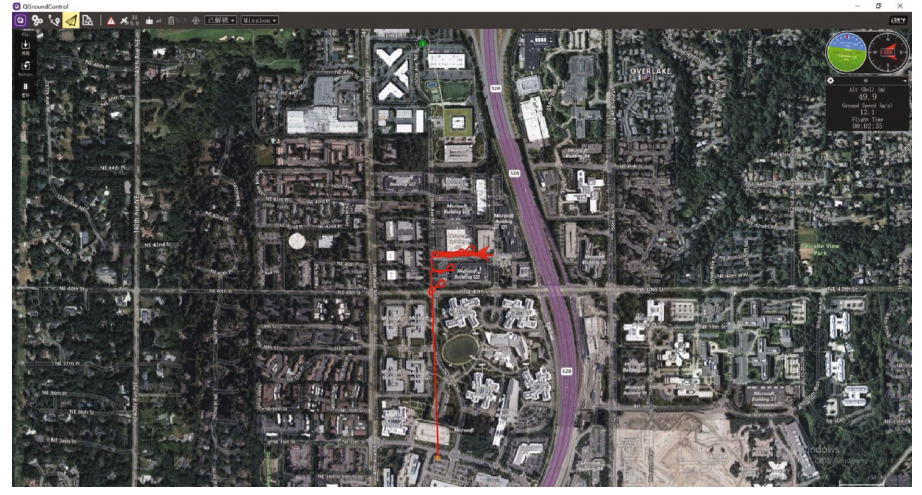
图6:无人机的全偏航轨迹可以直接在QGC中看到。
4.3LR抗欺骗模型的验证
在构建的模拟欺骗场景中,我们引入了一个斯塔克尔伯格游戏来验证LR反欺骗模型的有效性。根据第3节,GPS欺骗者根据目标平面的飞行状态动态调整欺骗信号,并利用LR反欺骗模型与无人机玩游戏
图7显示了我们在无人机上部署的LR反欺骗模型的实验结果。
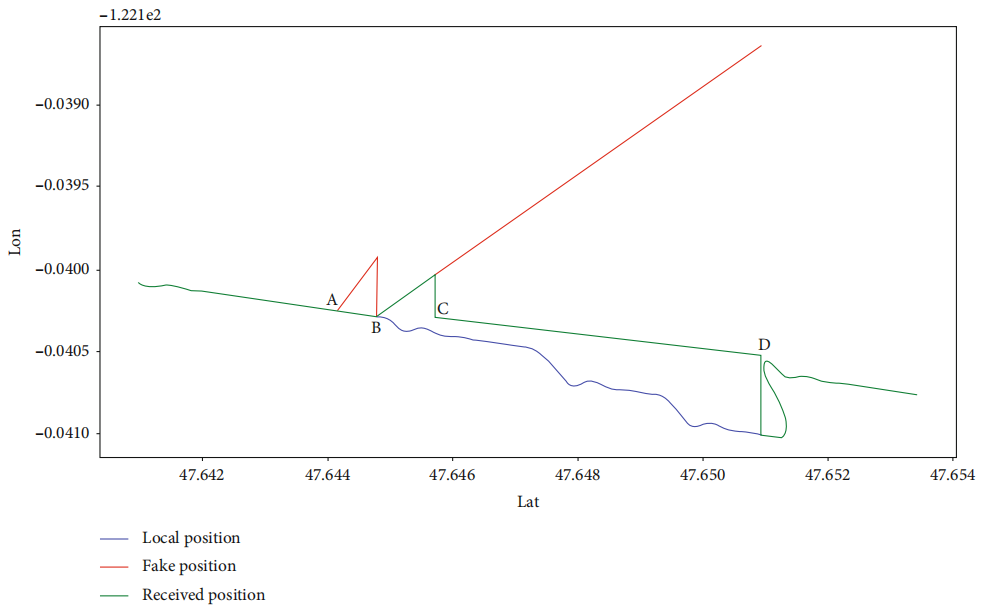
图7:红线表示GPS欺骗信号在捕获过程中的动态变化轨迹。绿线表示无人机认为它所在的位置。蓝线表示目标飞机在任务过程中的真实位置,即真实的飞行路径。

图8:无人机部署LR反欺骗模型的轨迹校正。
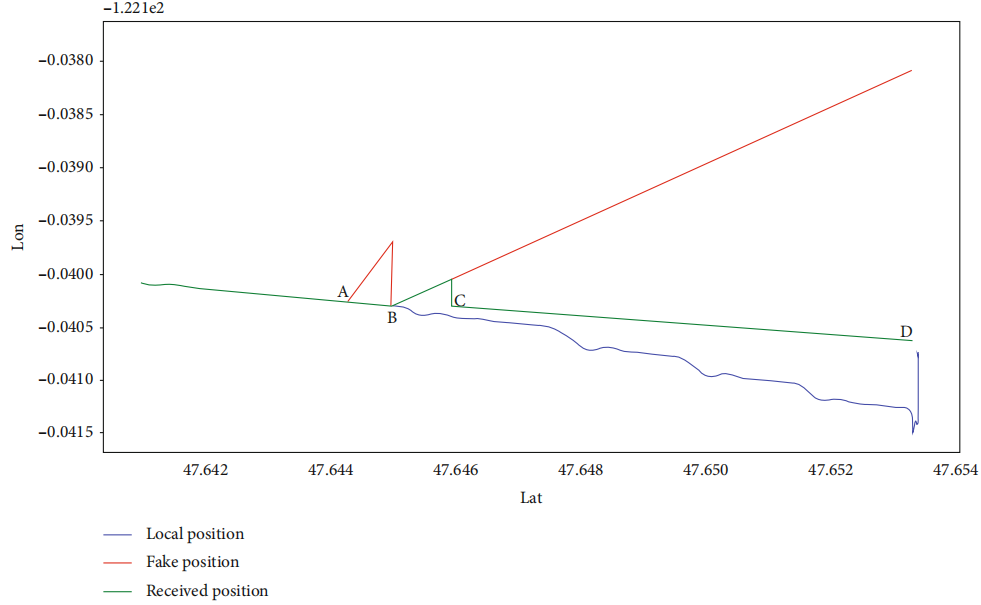
图9:红线表示GPS欺骗信号在捕获过程中的动态变化轨迹。绿线表示无人机认为它所在的位置。蓝线表示目标飞机在任务过程中的真实位置,即真实的飞行路径。
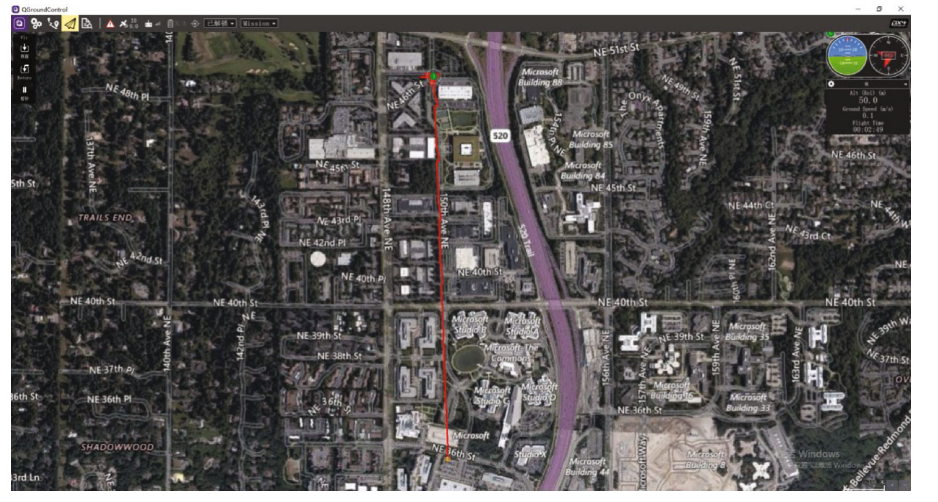
图10:无人机部署LR反欺骗模型的轨迹校正。
4.4基于LSTM的无人机轨迹预测
图11主要表示LR和LSTM在轨迹预测中的性能,蓝色分别表示已建立的路径点,绿色和红色分别表示LR和LSTM的预测路径点。从本图中可以明显看出,以给定的路径为准则,基于LR的预测模型的拟合能力优于基于LSTM的预测模型,这是因为对于无人机两点巡航任务的轨迹预测问题,无人机的经纬度变化与定位的时间变化存在线性关系,LR模型的期望目标值是输入变量的线性组合,该模型简单、易于建模,非常适合解决这个问题。因此,LSTM神经网络适合于解决非线性问题;它在解决线性问题方面有很大的缺点,即它本身的不确定性,因为相同的输入会产生不同的输出,因此单独使用LSTM不适合我们想要解决的问题。

图11:基于LSTM和LR的安全任务环境下轨迹预测的性能比较。
声明:本文来自轩辕实验室,版权归作者所有。文章内容仅代表作者独立观点,不代表安全内参立场,转载目的在于传递更多信息。如有侵权,请联系 anquanneican@163.com。
