2022年2月,美国米切尔研究所发布了《超越精灵之尘——理解和开发无人机自主性框架》(Beyond Pixie Dust——A Framework for Understanding and Developing Autonomy in Unmanned Aircraft)报告,提出了由“作战人员视角”和“工程师视角”两部分组成的无人机自主性框架,旨在促使作战人员与工程师之间的沟通更顺畅,帮助他们确定最有前景的自主飞机技术,并迅速将这些技术转变为美国作战指挥官所需的作战能力。

图1 《超越精灵之尘——理解和开发无人机自主性框架》报告封面
美国空军在过去十年中发布的几乎所有愿景、战略和飞行计划,都将下一代无人机、自主性和人工智能确定为在未来战场上确保获得决定性作战优势的关键技术。美国空军的作战人员长期以来一直设想使用越来越自主的无人机(UAV)来执行一些要求苛刻的任务。美国空军现在正在开发新的作战概念,拟将有人驾驶的战斗机和轰炸机与自主无人机进行编队组合(称为“有人-无人编队(MUM-T)”),并将其用于执行打击、防空、电子战和其他任务。MUM-T的目标是提供一套备选方案,显著增强作战能力与运载能力。此外,使用无人技术降低企业任务成本也是这一概念的驱动因素。鉴于当前和未来挑战的规模,成功交付符合这些作战能力、运载能力和成本目标的MUM-T势在必行。
为了使MUM-T在作战领域发挥作用,有人和无人驾驶飞机以一种有效且受作战人员信任的方式密切协作将是至关重要的。未来的作战空间不会完全是有人或无人的作战空间,而将是一种混合体。为此,本文提出了一个由“作战人员视角”和“工程师视角”两部分组成的框架。“作战人员视角”定义了无人机执行核心飞机控制、任务以及编队功能所需的不同自主性等级。“工程师视角”可以使用作战人员的视角来定义和开发特定的技术和系统,以满足作战需求。这一框架使美国空军和其他军种能够调整自主性的规模并加快自主无人机队的开发和部署速度,从而使美国相对于其战略竞争对手能够保持技术优势。
1 自主技术是MUM-T的关键
MUM-T的潜在用例包括前沿传感、电子战、扩展武器有效载荷、对敌防空压制和摧毁以及进攻性/防御性防空护航等。
从兵力设计的角度来看,MUM-T自主飞机将是建设未来美国空军的一个关键。自主编队飞机将提高美国空军进行精确打击及其他作战效果的能力,同时给敌方防空系统带来额外的目标工作困境。最终,自主编队飞机将使机组人员能够把更多的时间和注意力集中在更重要、更困难和要求更高的任务上,利用人类认知和决策的优势,在高端均势冲突中取得战斗胜利。与完全由有人驾驶飞机组成的部队相比,自主编队飞机的企业成本优势,以及确保任务效果的能力,是推动对这一领域进行投资的重要因素。
美国空军、国防部的其他机构和防务公司正在参与多个项目,为现有和未来的无人机平台开发自主功能。空军研究实验室(AFRL)的Skyborg项目旨在开发“全任务自主性”,将该项目作为其低成本可消耗飞机系统(LCAAS)概念的一部分,以实现有人-无人编队协同作战。Skyborg并非一架飞机,而是一个自主技术的开放系统架构,旨在与各种不同的飞机广泛兼容。美国国防高级研究计划局(DARPA)的“空战演进”(ACE)项目一直致力于开发一种人工智能,使之能够学习与高度动态战斗机相关的机动飞行。“空战演进”项目的“阿尔法狗斗(Alpha Dogfight)”虚拟试验测试了人工智能与人类飞行员在基本战斗机机动(空中格斗)中的较量,其中人工智能在所有五次交战中都获得了胜利。防务公司也在开发能够进行自主MUM-T作战的多种设计,除了奎托斯公司和通用原子公司-ASI的项目外,洛克希德•马丁公司的Have Raider MUM-T演示机、诺斯罗普•格鲁曼公司的437型自主飞机和波音公司的“忠诚僚机”无人机,也都承诺提供新的人工智能自主编队飞机,这将帮助美国空军保持相对于均势对手的技术优势。
2 自主性框架概述
报告中提出的自主性框架建立在人类飞行员如何思考和操作的基础之上。这一框架的目的在于:一是促进作战人员对自主性的理解,二是为自主技术的发展提供一个模型。将这一框架建立在作战飞行员在战场上如何思考和作战的基础之上,将帮助作战飞行员更好地理解和解释自主飞机应该如何执行任务。该框架还应考虑到作战人员对自主性的信任度和接受度。这将是初步部署自主无人机队并将其整合到作战概念和战术中的关键一步,同时也是确定不断成熟的自主性技术如何随着时间推移继续提高自主无人机能力的关键一步。
该框架应具备以下特点:
为开发无人驾驶飞机的自主能力提供一致的结构;
在描述用于开发作战概念的自主能力时产生更高的保真度;
为支持自主性的技术进行合理和审慎的优先级排序奠定基础;
明确人类在自主飞机作战中的作用;
建立一个涵盖科学技术、采办、作战和政策制定群体的共同参照点;
让高级领导人和政策制定者能够在能力、风险和成本之间做出明智的权衡;
提倡使用具体且精确的语言,以减少利益相关者之间的沟通错误和误解。
最终,无人驾驶飞机自主性框架应该促进作战人员与工程师之间进行更顺畅的沟通,帮助他们确定最有前景的自主飞机技术,并迅速将这些技术转变为美国作战指挥官所需的作战能力。
报告建议的自主性框架包含两个主要部分:“作战人员视角”和“工程师视角”。
“作战人员视角”分为三个自主性功能类别,分别称为核心、任务和编队,这种分类基于作战飞行员在任务执行期间的认知过程。由于这些功能类别是根据作战飞行员自身的心理和身体任务为模型,所以这一框架直观地将自主性算法和行为映射到人类对其效能的期望上。这一框架还包括每个类别中的五个自主性等级,每提升一个等级就代表自主性程度增加一个等级。
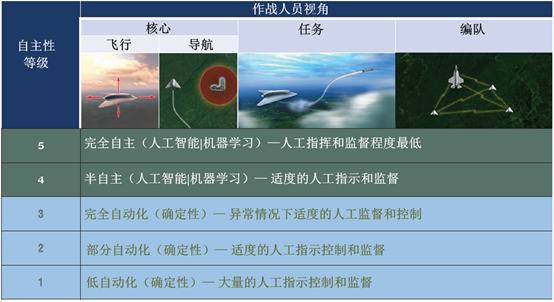
图2 在作战人员视角中,自主性类别和等级一起使用,以形成描述无人驾驶飞机作战行为和属性的标准。
“工程师视角”使用来自“作战人员视角”中的类别及其自主性等级的信息来指导未来MUM-T作战所需的数据、软件和硬件的开发。具体包括:为工程师提供向作战人员和项目经理提供反馈的基础,让其能够解释软件和硬件开发中的限制或潜在的权衡。
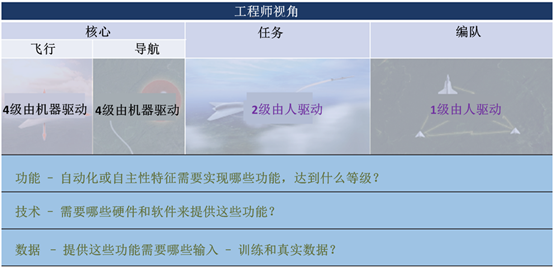
图3“工程师视角”从“作战人员视角”中获取每个自主性类别所需的自主性等级,并提供一种结构化的方式,将自主能力分解为必要的功能、技术和数据。在这个例子中,“作战人员视角”将“核心飞行”和“导航”的自主性分配为4级,而将“任务”分配为2级,将“编队”分配为1级。
3 建议
将越来越自主的无人机与有人驾驶飞机进行编队,对于未来美国空军的发展至关重要,可让其拥有在均势冲突中竞争和取胜所需的韧性、运载能力和杀伤力。开发这些无人机以及推动这些无人机的自主性是美国空军的当务之急。为此,报告提出以下建议:
美国空军需要一个自主性框架来指导下一代无人机需求定义、采办项目以及作战概念和战术、技术与程序开发。美国空军作战人员、航空航天工程师和采办专业人员目前缺乏一个框架来帮助他们理解什么是自主性,以及如何将其应用于未来的MUM-T作战概念和飞机。
无人驾驶飞机的双视角自主性框架提供了一个模型,美国空军可以使用该模型来促进作战人员、技术人员和航空航天工程师之间开展更大程度的协作。这个框架是以作战飞行员的心理任务和功能为基础,可以帮助作战人员以他们熟悉的作战术语来理解自主系统。然后,这个框架向技术人员和航空航天工程师提供这些作战视角,为他们的系统开发工作提供指导。虽然这个框架目前只是一个模型,可以促进加速开发和部署MUM-T无人机所需的通信和协作,但其目的并非对作战人员或工程师加以限制。
美国空军负责战略、整合和需求的副参谋长(AF/A5)应与负责作战的副参谋长(AF/A3)、空中作战司令部和全球打击司令部密切合作,正式担负起倡导和实施该框架的职责。在空军参谋部,AF/A3与作战团体、空军作战中心和主要作战司令部都有着深厚的联系。AF/A5和AF/A3可以一起在空军的需求定义以及采办和开发流程中倡导并实施这个无人驾驶飞机双视角自主性框架。
利益相关方应该接受并广泛使用这个双视角框架来指导自主性研究、开发和试验,并为新战术、技术、程序和作战概念的开发提供信息。充分利用这个框架的潜力将需要A5的参谋人员、作战人员、采办专业人员、技术人员和工业界在整个需求定义、采办和开发生命周期中保持紧密的协作互动。这个框架的效用远远超出了传统的采办流程。通过在MUM-T无人机的整个生命周期中采用这个框架,可以鼓励作战人员和技术人员在开发创新的自主编队飞机作战概念、TTP、部署后试验和持续现代化升级时更具创造性。
4 结论
无人驾驶飞机的自主性是一系列具有挑战性的问题,需要开发作战概念对这一新兴技术加以利用,并且需要对支持这一技术的研发工作提供相应的指导。无人机的双视角自主性框架打破了这些问题,并为建立一个有凝聚力的自主性方法和有人-无人编队协作方法提供了坚实的基础。作为贯穿美国空军推动无人机作战自主化的愿景文件、战略、飞行计划、作战概念、研发工作和各种项目的统一主线,这个框架在利益相关方之间建立了一种通用语言和结构。共同的理解能够增加作战概念内部和之间的一致性,并为确定研究和开发的优先次序奠定合理和可靠的基础。因此,当务之急是建立一个框架,使美国空军能够利用自主性的力量来保持其长期以来所拥有的空中力量优势。
声明:本文来自防务快讯,版权归作者所有。文章内容仅代表作者独立观点,不代表安全内参立场,转载目的在于传递更多信息。如有侵权,请联系 anquanneican@163.com。
