李豹,许江宁,朱银兵,曹可劲,胡彦逢,李松林
(HJ工程大学导航工程系)
一、引言
卫星导航系统能够为近地空间各类用户提供全天候、连续、高精度的位置、速度和时间信息,具有其他导航系统不可比拟的性能优势,在军民定位、导航、授时领域日益发挥着重要作用[1]。由于卫星导航信号到达地面时信号功率仅为-130dBm,十分微弱,而且民用信号体制公开,使得卫星导航系统极易受到各种干扰的影响[2,3]。随着卫星导航系统重要性的日益凸显,针对卫星导航信号的利用与防护的“导航战”成为电子对抗的一个重要分支。
卫星导航信号干扰主要有两种体制:压制干扰和欺骗干扰,压制干扰是指在卫星导航工作的频率上发射一定带宽和较高功率的噪声信号,使接收机信噪比下降,不能正常工作,而欺骗干扰是指复制与真实导航卫星信号具有完全相同码相位、载波频率和多普勒频移的假信号实现干扰[4,5]。由于针对压制干扰的自适应调零、波束形成、空时二维滤波等技术及相关产品逐步成熟,而且欺骗干扰在干扰隐蔽性和干扰效率方面的具有显著优势,欺骗干扰逐渐成为卫星导航干扰技术研究的热点[6]。本文首先分析卫星导航欺骗干扰的基本原理,针对欺骗干扰对终端影响、转发式欺骗干扰、新型渐变自同步欺骗干扰三个方面的研究现状进行总结,并对未来欺骗干扰技术的发展进行了展望。

二、欺骗干扰基本原理
⒈欺骗干扰攻击原理
欺骗式干扰是指信号发射器通过机载、球载或地面的方式,发射与卫星信号结构相同、相似而功率更强的信号,使接收机误以为是真实信号而进行搜索捕获。相比较压制干扰用强功率阻止卫星导航终端接收信号,攻击范围较大的特点;欺骗干扰通过模拟卫星导航信号进行诱骗,一般情况下针对某个特定的用户,具有较强的隐蔽性,破坏性和威胁性更大[5]。
由于卫星导航系统的基本原理是无线电测距定位,近地面用户通过接收4颗以上卫星信号,计算伪距后通过球面交汇完成定位,所以欺骗干扰的本质是通过发射信号误导目标用户得到错误的传播时延和伪距,导致目标用户定位到欺骗点上,其原理示意图如图1所示,如果欺骗干扰源能够灵活控制伪距的变化(即图中虚线部分),则可以实现任意位置欺骗。
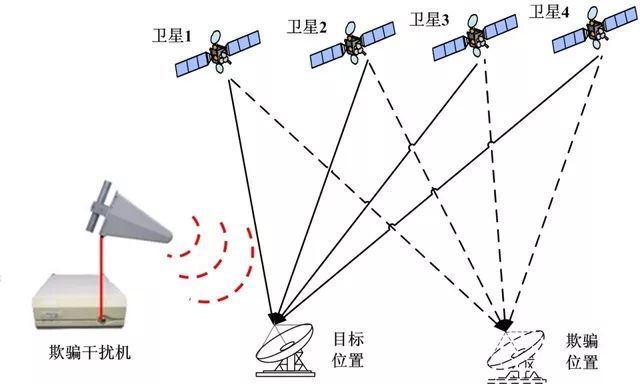
图1 欺骗干扰伪距变化原理示意图
⒉欺骗干扰分类
按照欺骗信号生成方式,欺骗干扰可分为产生式欺骗和转发式欺骗两种体制。产生式欺骗需要知道卫星信号格式,且需要使用价格昂贵的卫星信号模拟器,而军用信号格式一般未知,使得其应用特别是在军用领域实用性不强。
转发式干扰又可分为直接转发或间接转发,是指对收的到卫星信号经过一定延时或特定处理后发送,由于延时规律相对固定,因而容易被察觉并被一些抗干扰手段防御。
除上述两种类型外,近年来出现了一种欺骗接收机跟踪环路的渐变自同步欺骗干扰,相关文献将其归类为准产生式欺骗[5,7]。它指干扰机接收到真实信号后,根据目标接收机的动态性能进行距离延时、多普勒调制,实现目标不察觉情况下控制卫星时延的目的,可以进行预订位置或路径的渐变式引导欺骗,是一种隐蔽高效的新型欺骗方式。
三、主要技术与研究进展
⒈欺骗干扰对卫星导航信号处理的影响
卫星导航接收机信号处理通常包括下变频处理、信号捕获和跟踪三个阶段。信号捕获主要完成信号识别、载波频率和码相位的二维粗略搜索,为了捕获卫星信号,本地需要同时复现卫星的码和载波,与接收信号进行积分和累加,将累加的结果与检测门限比较,以确定卫星信号存在与否。信号跟踪环节利用捕获得到的粗略载波频率和码相位,完成更精细的载波和码同步。当前捕获的研究重点在于讨论欺骗干扰功率条件的影响,而跟踪主要研究欺骗攻击的过程,即欺骗信号在临界功率条件下对接收机跟踪环路的引导规律。
文献[8]给出了GPS接收机捕获概率表达式,指出转发式欺骗首先要进行压制,并通过对捕获概率模型的分析认为:在欺骗信号和正常信号同时存在的情况下,干扰信号只需比正常信号大7~10dB即可有很好的捕获干扰效果。
文献[9]给出了C/A码接收机I、Q支路输出的表达式,根据捕获和跟踪码、载波环路的输出表达式讨论了欺骗干扰对接收机捕获和跟踪环节的影响,着重分析了不同相位欺骗干扰对应的欺骗效果。
文献[5]指出,在信号捕获环节,如果欺骗信号与真实信号相关峰超过1.5个码片,相关函数就会出现多峰特性,在接收机稳定跟踪的情况下,欺骗干扰破坏接收机跟踪状态的临界干信比功率条件为24dB。
国防科大黄龙等提出一种通过牵引目标接收机跟踪环路的自同步式欺骗干扰信号生成方法,该方法在欺骗信号功率高于真实信号4dB的情况下50分钟内可成功欺骗典型的GNSS接收机,且不需要压制即可完成欺骗,提高了欺骗的隐蔽性[7]。
上述研究表明,在接收机不同工作阶段成功实施欺骗所需的条件不同,在导航接收机稳定跟踪的状态下,欺骗成功的功率条件比捕获状态要求更高。当然,要实现接收机隐蔽欺骗,在干扰功率条件接近的情况下,欺骗实施方法和效果还需进一步研究。
⒉转发式欺骗干扰
转发式欺骗干扰原理示意图如图2所示,干扰源接收卫星导航信号后进行转发,控制定位方程的延时量,可根据不同卫星时延实现任意位置欺骗效果,目前针对转发式欺骗干扰的研究主要集中在欺骗位置即区域计算方面。

图2 转发式欺骗干扰原理示意图
杨景曙等讨论了利用多个方向性很强的天线以及时延控制器控制不同卫星信号时延实现对目标接收机位置欺骗的方法,基于定位原理给出了真实位置和欺骗位置的映射关系[4]。此后其研究团队对这种映射欺骗方法和时延控制方法进行了后续研究,文献[10]给出了具体算例,所需干扰机延时为10-10量级,引起授时误差为10-7量级,远高于授时精度要求,因而可以在不影响授时的情况下,完成欺骗。
文献[11]对GPS转发欺骗式干扰的时延算法进行了研究,得出了对接收机钟差无影响时转发式欺骗所满足的条件;并指出当转发器位于卫星与真实点的连线上时,能使对接收机钟差不产生影响的虚拟点的范围最大。
利用分布式转发器模拟卫星导航星座,通过转发器时延的控制实现定位区域上的映射关系,不仅仅能够实现欺骗干扰,还能对欺骗后的轨迹进行控制,从而实现欺骗干扰和导航的一体化,文献[12]讨论了这种一体化平台的布阵和运动模型。
这些研究主要从定位原理出发,讨论欺骗位置控制的方法,但是从信号处理角度实现欺骗信号时延控制是实现该方法的前提。
⒊渐变自同步欺骗干扰
渐变自同步欺骗干扰在欺骗信号功率与真实信号接近的情况下,在欺骗对象不察觉情况下侵入接收机跟踪环路并进行渐变诱导(实施过程如图3所示),实现预订位置或路径的渐变式引导欺骗,是当前卫星导航欺骗干扰技术领域的研究热点[13-17]。

图3 渐变自同步欺骗干扰实施过程示意图
2008年,美国德州大学的Todd Humphreys等在GPS软件接收机基础上增加了欺骗软件模块发射硬件模块,设计制造了一个欺骗干扰源演示了欺骗干扰的可行性。通过准确探知目标接收机的位置及运动状态,将接收到的GPS信号处理后重新发出,使欺骗信号到达目标接收机的相位与真实卫星信号基本一致:相关峰同步,逐渐升高欺骗信号功率,将接收机跟踪环路引导到欺骗信号,最终改变欺骗信号的相位信息使目标接收机得出错误的定位结果。可同时接受12路GPS L1C/A码信号并同步产生12路欺骗信号,是第一台真正意义上的GNSS渐变欺骗干扰源[18,19],该干扰源如图4所示。

图4 Todd团队设计的欺骗干扰源
2012年6月,美国国防部组织了GPS无人机的欺骗试验,Todd Humphreys团队使用硬件成本不到1000美元的民用GPS信号欺骗设备释放欺骗信号,控制飞机自动驾驶系统使无人机高度下降,当接近地面时,控制人员通过手动操作拉升无人机避免飞机坠机,2013年该团队又对一艘依赖GPS的游艇进行了引导欺骗。上述试验有效论证了完全依赖GPS可能存在的隐患[20,21]。
这种渐变欺骗需要实现与接收机跟踪环路渐变同步,对于利用卫星导航系统进行自主导航的无人机、导弹,可通过实施精密的欺骗干扰控制其飞行轨迹,使无人机降落在指定区域,甚至可以控制敌方导弹转向攻击敌方目标[22],在国民经济重要领域特别是军事应用方面具有重大的应用价值,将会是下一步GNSS欺骗干扰的研究重点。
渐变自同步欺骗干扰技术实现的关键是干扰信号如何有效侵入目标接收机实现隐蔽同步诱骗,对于民用和军用接收机来说,技术实现难度程度不同。对于民用接收机,由于民用伪随机码体制公开,本地可重复产生伪随机码周期信号,在欺骗信号存在多普勒偏移的情况下,其在一段时间内可以移动到真实信号相同的码相位,从而实现欺骗。对于军用接收机,由于军用伪随机码未知,需要采用方向性强的天线隔离不同卫星信号,通过转发间接控制进行欺骗,且事先要预估目标的概略位置和运动趋势,得到欺骗相位条件,具有较大难度。
四、结束语
本文系统论述了卫星导航欺骗干扰技术的研究进展,总结了卫星导航欺骗干扰的基本原理和分类,针对欺骗干扰对接收机的影响、转发式欺骗干扰定位模型、新型渐变自同步欺骗干扰三类主要技术及其研究进展进行了分析。论述表明:在压制干扰技术逐步成熟的情况下,干扰隐蔽性更强、效果更好、危害性更大的欺骗干扰技术会逐步成为人们关注和研究的重点,而新型渐变自同步欺骗干扰由于在隐蔽性方面的优势及潜在的应用前景将会成为GNSS欺骗干扰技术的未来发展方向。
参考文献
[1]杨元喜,李金龙,王爱兵,等.北斗区域卫星导航系统基本导航定位性能初步评估[J].中国科学:地球科学,2014,44(1):72-81.
[2]Jahromi A J,Nielsen J,Lachapelle G.GPS spoofer countermeasure effectiveness based on using signal strength,noise power and C/no observables[J].International Journal of Satellite Communications and Networking,2012,30:181-188.
[3]周轩,李广侠,蔡锭波,等.卫星导航系统防欺骗技术的回顾与展望[J].导航定位学报,2013,1(3):79-84.
[4]杨景曙,曾芳玲,盛琥,等.通过区域映射实现诱导的GPS干扰系统[J].电子学报,2005,33(6):1036-1038.
[5]吕红丽,翟建勇,王伟.卫导接收机欺骗干扰威胁和反欺骗措施分析[C].武汉:第四届中国卫星导航年会论文集,2013.05.
[6]李方能,李豹,吴苗,许江宁.卫星导航空时自适应波束形成抗干扰技术研究[J].海洋测绘,2015,35(06):33-36.
[7]黄 龙,吕志成,王飞雪.针对卫星导航接收机的欺骗干扰研究[J].宇航学报,2012,33(7):1884-890.
[8]刘延斌,苏五星,闫抒升.转发式欺骗信号干扰GPS接收机的效能分析[J].空军雷达学院学报,2004,18(4):4-6.
[9]梁高波,高义,陈杨.欺骗式干扰信号对GPS民用接收机的影响分析[C].武汉:第四届中国卫星导航年会论文集,2013.05.
[10] 张颂,杨景曙,潘高峰. 诱偏暨导航一体化系统中诱偏时延算法[J].安徽大学学报(自然科学版),2011,35(01):64-68.
[11]闫占杰,吴德伟,刘海波,等.GPS转发欺骗式干扰时延分析[J].空军工程大学学报(自然科学版),2013,14(4):67-70.
[12]张颂,杨景曙,潘高峰,等.诱偏暨导航一体化系统平台优化布阵及运动模型[J].中国科学技术大学学报,2011,41(08):746-752.
[13]Todd Humphreys,Jahshan Bhatti,Daniel Shepard, EvansThe Texas Spoofing Test Battery Toward a Standard for Evaluating GPS Signal Authentication Techniques[C].2012 ION GNSS Conference Nashville,TN,September 18–21,2012.
[14]Todd E.Humphreys,Detection Strategy for Cryptographic GNSS Anti-Spoofing[J].IEEE Transactions on Aerospace and Electronics Systems,2013,49(2):1073-1090.
[15]Wesson K,Shepard D,Humphreys T.Straight Talk on Anti-Spoofing Securing the Future of PNT[J].GPS World,2012,23(1):32-39.
[16]Todd E.Humphreys,Jahshan A.Bhatti,Brent M.Ledvina.The GPS Assimilator a Method for Upgrading Existing GPS User Equipment to Improve Accuracy,Robustness,and Resistance to Spoofing[C].ION GNSS Conference Portland,OR,September 21-24,2010.
[17]Kyle D.Wesson,Daniel P.Shepard,Jahshan A. Bhatti,etal.An Evaluation of the Vestigial Signal Defense for Civil GPS Anti-Spoofing[C].2011 ION GNSS Conference Portland, OR, September 21–23, 2011.
[18]Humphreys T E,Ledvina B M,Psiaki M L,et al.Assessing the spoofing threat: development of a portable GPS civilian spoofer[C].ION GNSS, Savannah,Georgia,Sept.16-19,2008:55-56.
[19]Scott.L.Anti-Spoofing & authenticated signal Architectures for civil navigation system[C]. ION GPS/GNSS,2003.
[20]Humphreys,T.UAVs vulnerable to civil GPS spoofing[EB].http://gpsworld.com.2012.
[21]Shepard, D.,P. Bhatti,A.Jahshan,T.E.Humphreys,etal.Evaluation of Smart Grid and Civilian UAV Vulnerability to GPS Spoofing Attacks[C].in Proceedings of the ION GNSS 2012,September 17-21, Nashville,TN,pp.3591-3605.
[22]张会锁,高关根,寇磊.利用轨迹诱导的欺骗式GPS干扰技术研究[J].弹箭与制导学报,2013,33(3):149-152.
【作者简介】第一作者李豹,1986年出生,男,湖北天门人,讲师,博士,主要从事卫星导航信号处理、精密定位技术研究;本项目为基金项目,国家第二代卫星导航系统重大专项(GFZX0301040303);国家自然科学基金重点项目(41631072);国家自然科学基金项目(41504029、41471387);本文来自《海洋测绘》(2018年第3期)。
声明:本文来自溪流之海洋人生,版权归作者所有。文章内容仅代表作者独立观点,不代表安全内参立场,转载目的在于传递更多信息。如有侵权,请联系 anquanneican@163.com。
