作者:修树斌,王世伟(杭州杭千高速公路发展有限公司)
摘要:我国公路发展快速,全国高速公路网主骨架基本形成,高速公路发展重心由建管为主转向建管养运服并重,高速公路由电子化、网络化时代跨入数字化、信息化、智能化数字交通时代。为此,很多路公司纷纷以智慧高速建设为抓手,大力开展数字孪生等新技术在高速公路的深度融合应用。本文立足杭新景(杭千)高速数字孪生技术的应用成果,重点介绍关键技术的突破。
杭新景(杭千)高速公路(以下简称为杭千高速)数字交通感知及应用试点系统是基于全息感知数字孪生技术管控系统,采用计算视觉、雷达探测、边缘计算、人工智能、大数据、移动互联等新一代的信息技术,以数字手段提高对高速公路的智慧化管理。杭州杭千高速公路发展有限公司(以下简称为杭千高速公司)积极开展数字交通融合新基建的技术研究,选择车流量大、事故多、线型复杂的16公里路段建设数字交通感知及应用系统,依托路网数据的全息感知,试点验证高速公路数字化相关的模型、感知、位置、交互、人工智能、大数据等技术的全面融合,特别是雷视拟合、全域融合、目标跟踪、事件检测等关键技术。实施结果表明,数字交通感知及应用系统采用数字孪生技术在感知、识别、判断三个关键环节上取得重大突破,实现路网多要素全息感知、全域跨路段融合、目标轨迹实时跟踪、交通事件快识别快联动,以数字孪生的能力,提高公路数字化水平,强化公路运营能力,保障公路行车秩序,提升事件处理能力。
1 创新突破
杭千高速数字交通感知及应用系统采用三层体系架构,搭建了高速公路新型基础设施、全息数据底座和孪生应用体系。其中新型基础设施包括高清摄像机、毫米波雷达、高精地图,边缘计算服务器,光纤网络、移动网络、卫星定位、云服务等设施设备。全息数据底座集成数据、模型、算法等十大引擎,实现数据治理、数据融合、数据赋能等数字交通中枢功能,构建数据融合、技术融合、业务融合的数字孪生底座,形成高速公路各种交通数字孪生体,支撑数字孪生能力的激发和释放。孪生应用体系依托数据底座开放接口,通过数字孪生应用支撑引擎,聚焦运行监测、车辆管理、事件管理、拥堵治理等重点业务领域,构建智能化、工具化的场景服务,实现跨层、跨业务、跨部门高效协同的流程闭环;根据管理需要全周期功能迭代、场景创新、业务拓展,助力高速公路智慧化的发展。三层体系的核心是数字孪生。
杭千高速数字交通感知及应用系统试点项目的数字孪生技术取得创新突破,系统中数字孪生技术是由视觉识别、雷达识别、空间标定、识别过滤,视觉融合、雷视融合、区域融合、融合过滤和目标定位、目标关联、轨迹关联、轨迹跟踪、轨迹过滤,事件识别、事件定位、事件过滤等技术高度集成、全面融合的新型技术。所有技术缺一不可,特别在路网感知、数据融合、车辆跟踪、事件发现等方面取得了重大发展,运用雷视拟合感知、全域数据融合、目标轨迹跟踪、全息事件检测等创新技术突破数字孪生技术瓶颈,赋能高速公路精准管控,助力高速公路的数字化、网络化、智能化发展。
1.1 雷视拟合感知技术是基础
高速公路数字孪生基于对公路基础设施、公路运行状态各要素进行动态监测和精准描述,包括静态数据、动态数据。当前的技术手段取得道路标志标线、设备设施属性等静态数据不难,难度在于获取车辆、行人、交通流、交通事件等要素的动态数据,需实现全天候环境下的车辆、行人等全要素、全量数据的感知能力,具备对车辆、行人等目标动态特征检测、动态目标定位的能力,具备对光照、抖动、温差等环境因素影响的自适应能力。杭千高速利用视觉和雷达优势互补,采用拟合感知技术,高质量获得了静动态数据。
1.1.1 高清摄像机
采用全局曝光的900W高清摄像机,对高速公路进行高频、高码率的图像数据采集,通过计算机视觉算法对图像进行处理,可获取摄像机有效范围内车辆等目标的特征数据,包括机动车车辆类型、车牌号码、车身颜色、车辆品牌、车辆款型、车辆大小以及车辆坐标、所在车道、速度、方向,行人、非机动车的类型、坐标、速度、方向,以及道路车道、标识标线等。高清摄像机采集的图像受雨雾、夜晚、逆光、强光、遮挡等因素的干扰而失真,影响视觉算法对目标特征的提取,进而影响数据的全面性、准确性和稳定性。基于视觉算法对目标定位、目标速度估计受成像技术的影响而误差较大。因此,以摄像机的视觉感知技术可以获取高速公路丰富的特征数据,但不足以构建对具备高保真的数字孪生。
1.1.2 毫米波雷达
采用覆盖500米范围毫米波雷达对高速公路进行探测,利用雷达技术和算法可精准检测交通目标,以及交通目标位置、速度等动态数据。毫米波雷达受环境光照条件影响很小,但无法识别交通目标细分类型,以及车牌、颜色、车辆款型等特征,数据不全面。以雷达探测作为数据感知技术也无法完成对高速公路的数字孪生。
1.1.3 雷视拟合感知技术
雷视拟合感知是将视频与毫米波雷达采集的数据,运用多源异构融合算法进行智能拟合,以多维感知获取目标更全面、更准确的数据。利用视觉和雷达优势互补,将摄像机感知特征数据和雷达检测特征数据进行融合,包括静态特征数据和动态特征数据。基于高速公路交通特性,采用智能算法进行特征数据拟合,多维采集、双重验证、一体融合,获取公路基础设施和目标状态全量、精准的数据,包括结构化数据和非结构化数据,结构化数据包括机动车类型、车牌、车型、车辆颜色、坐标、车道、方向、速度、时间,行人和非机动车的坐标、速度、方向、时间,以及道路车道、标志标牌、施工状态、经纬度等,非结构化数据包括视频、图片等。高速公路全息数据类型如图1所示。
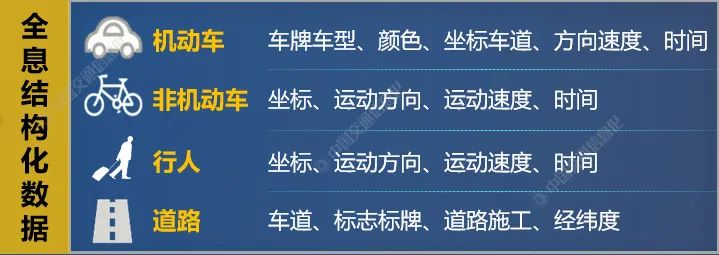
图1 高速公路全息数据类型
雷视拟合感知受光照、天气影响很小,适应全天候感知;雷达和摄像机分离部署,根据公路实际要求进行灵活组合,可适应高速公路多车道、大曲弯、高斜坡、部分遮挡等场地,实现全域无盲区的感知覆盖范围;雷达和摄像机的互补,获取更全更准的目标特征数据,提高数据的准确性。
1.2 全域数据融合技术是前提
雷视拟合感知实现了对同一感知点位内目标特征数据的融合,解决局部区域的数据感知。受限于传感器的有效感知范围,高清摄像机和毫米波雷达都无法实现对高速公路全域基础设施以及交通目标的感知,不同感知点位因为设备物理位置的变化,导致目标跨点位时相关数据属性关联发生了变化。为了构建目标在全域一致的数据体系,实现全域范围内的数字孪生,需对目标进行跨点位融合。
杭千高速公路数字孪生感知系统按照一定间距布设感知点位,每点位采用摄像机和雷达的组合对一定范围进行感知覆盖,点位之间通过重叠覆盖的方式构建全域无缝覆盖的感知数据采集体系。全域数据融合则通过点位覆盖区域的物理特性和传感器误差特性动态估计单点位的观测噪声,智能分析跨点融合区域,结合融合区域的物理特性和多个点位的观测特性,通过智能算法对多点位多个目标进行最优关联匹配,构建全域多点位多目标的数据体系。全域数据融合技术包含智能区域发现和区域过滤、多点位目标融合关联、多点位数据接力、数据补偿修正、数据预测估计等一系列智能算法和数据交换、数据检索、数据存储等数据处理技术。
1.3 目标轨迹跟踪技术是关键
高速公路的交通参与者包括机动车和行人,还可能出现非机动车。对全域范围内的所有交通参与者进行数字孪生,需要对在高速公路区域内的目标进行全周期跟踪,以获取目标实时姿态数据,识别目标行为特征,研判与之相关联的交通事件。对目标跟踪,利用视频数据是最直观的方式,但视频数据非结构化的属性,不利于对目标进行数字孪生的其他应用。基于目标定位特征数据和高精地图数据,通过构建目标轨迹模型,计算、分析获取时空维度特定目标关联的轨迹结构化数据,包括目标类型、目标坐标、姿态属性、基础属性、地图属性等,以及特定时间节点多目标轨迹数据、特定区域多目标轨迹数据。以实时高频的数据更新,将目标实际运行路径映射到数字空间进行虚拟跟踪,还原目标物理世界的行为姿态以及与其他目标的相对关系,包括车辆间(或行人)相对关系、与车道的相对关系、与车道标志标识的关系,与基础设施之间的相对关系,从而实现数字孪生的目标轨迹跟踪。车辆目标轨迹跟踪示意如图2所示。
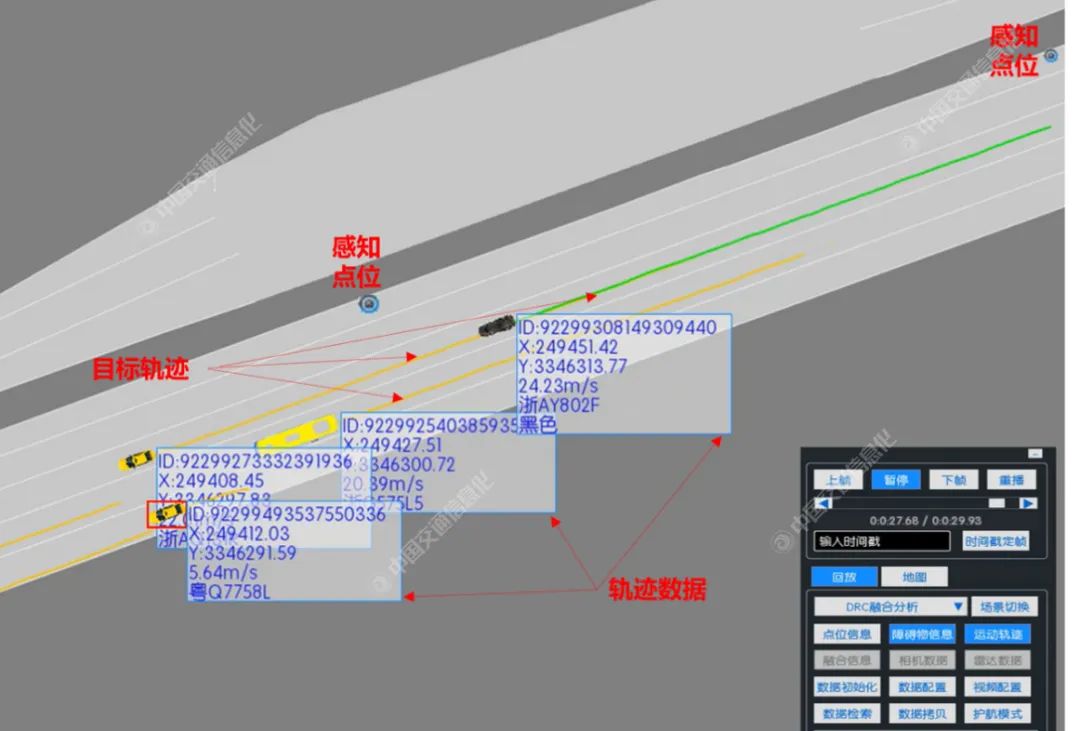
图2 车辆目标轨迹跟踪示意图
杭千高速目标轨迹跟踪技术,运用包括目标轨迹融合、轨迹匹配、轨迹重构、轨迹估计、轨迹异常消除、轨迹补全等一系列的智能算法,确保目标轨迹ID的唯一性和连续性,实现对视野内多目标持续跟踪。
1.4 全息事件检测技术是重点
交通事件是高速公路运营管理关注的重点,事件识别是实现高速公路数字孪生的重点。传统的交通事件检测通常基于对断面数据采集,通过视频分析或者雷达探测进行。从数据全面性考量,无法对高速公路进行数字孪生;基于单一感知事件检测,准确率无法得到保证,不具备数字孪生实时、保真、交互、闭环的能力。
杭千高速全息事件检测技术基于高速公路的全息感知、多感融合、多点融合的结构化数据,基于目标轨迹跟踪,综合高速公路管理规则,构建事件检测模型,运用特定事件识别算法实时数据、历史数据进行综合在线分析,快速识别交通事件且生成事件全息数据,映射到数字空间进行可视化呈现,实现对交通事件实时监测,事件全息信息辅助对交通事件的精准预警、快速联动、协同处置。交通事件包括交通事故、拥堵、异常停车、占道施工、超速行驶、低速行驶、超低速行驶、逆向行驶、车辆违停、占用应急车道等;事件全息数据包括事件类型、发生位置(道路、方向、桩号、车道)、发生时间、解除时间、视频、图片、参与者以及参与者位置、速度、运动方向、轨迹等全息事件档案基础信息数据。
2 创新应用
杭千高速公路运营智能化水平不高,主要体现为交通流量大、拥堵频发而监测手段不足;事件主动发现率低、提醒不及时、事件处置延迟;事件信息不全、事件联动低效和事件溯源分析难;“两客一危”等车辆事故占比高、影响大伤亡重,而车辆监测手段不足等。依托数字孪生技术能力,聚焦问题、分析场景,面向业务构建闭环的数字化流程,关注重点业务环节,以智能化、工具化的手段,赋能交通态势可视化监测、交通事件链式智控、重点车辆全息跟踪等业务应用创新。
2.1 基于数字孪生的交通态势监测
杭千高速杭富段、建德段车流量大、事故多发、线型复杂、拥堵频发,是杭千高速运营管理的重点和难点路段。原先该路段以视频监控画面为主,展现内容较单一、数据可视化效果较弱、交通事件无法实时预警和快速响应等问题,实现高效、便捷的日常运营管理能力。杭千高速依托数字孪生能力,重塑公路运行监测场景,以数字孪生体为目标,可视化呈现实时数据、统计指标、运行分析三个层面的综合态势,一图总览、抓住重点、把控全局,实现对高速公路的可视、可控、可管。
2.2 基于数字孪生的事件链式智控
杭千高速杭富段和建德段事故多发,但事件主动发现率低、提醒不及时、事件处置延迟,事件信息不全、事件联动低效,事件溯源分析手段不足、公路安全治理难。为切实改变这一状况,杭千高速重构事件检测模型和事件识别算法,依托数字孪生底座全息数据,提取车辆等要素和公路运行特征,综合分析研判、过滤干扰,实现全天候全路段九大类交通事件精准识别秒级发现,自动生成事件全息档案,全息事件档案可辅助快捷审核事件时间、位置(地点、车道等)、现场视图、原因等,智能生成模块化、个性化的信息一键发布,并对事件智能分析多维溯源,辅助事件成因分析和执法取证。对事件数据进行分析和挖掘,提升回溯分析效率和事件处置能力,为公路交通事件治理提供依据。
2.3 基于数字孪生的重点车辆监测
历史数据统计分析显示杭千高速交通事件中“两客一危”等重点车辆事故占比高、影响大伤亡重,目前车辆监控手段不足、安全隐患大。杭千高速构建重点车辆监测场景和车辆追踪算法,依托数字孪生底座的全息数据,主动识别重点车辆且创建车辆列表,高亮滚动警示,实现多手段主动发现、智能定位轨迹跟踪、实时视频自动接力、多目标多视角全面监测、自动构建车辆库,根据车辆库提升对重点车辆管控水平和车辆综合治理决策。
3 结束语
杭千高速基于全息感知数字孪生技术,在感知、融合、跟踪、识别等关键技术领域实现重大突破,以全息感知为基石,构建高速公路全息数据底座,以软件数据定义公路基础设施,打造公路数据一体化采集和共享平台,赋能实现高速公路更多应用场景智慧化,提升高速公路通行效率和行车安全,助力高速公路的智慧运营。
(原文刊载于2023年第11期《中国交通信息化》)
声明:本文来自中国交通信息化,版权归作者所有。文章内容仅代表作者独立观点,不代表安全内参立场,转载目的在于传递更多信息。如有侵权,请联系 anquanneican@163.com。
