2019年3月,美国防高级研究计划局(DARPA)“终身学习机器”(L2M)项目研究人员在《自然·机器智能》杂志发表了其有关人工智能算法的研究结果,介绍了一种由类似动物肌腱驱动的人工智能控制机器人肢体,意味着该项目取得重大进展。
一、研究背景
当前的机器学习系统无法不断学习或适应新的情况。系统程序在经过训练后就会固化,因此在系统部署后,无法对新的、不可预见的情况做出响应,而通过增加新信息来修改程序缺陷又会改写现有的训练集。在当前技术条件下,解决这一问题需要使系统脱机,并利用包含新信息的数据集对机器系统进行重新训练。
二、研究目标
为解决上述挑战,DARPA开展“终身学习机器”项目,旨在开发能够在任务执行过程中不断学习并变得越来越专业的系统,在将以前的技能和知识应用于新情况的同时,不会忘记之前的学习内容。
三、研究成果
自2017年首次公布以来,“终身学习机器”项目一直在研发下一代人工智能系统及其组件,以及在生物有机体中能够转化为计算过程的学习机制。该项目通过不同时长和规模的资助及合同等形式为30个研究小组提供支持。
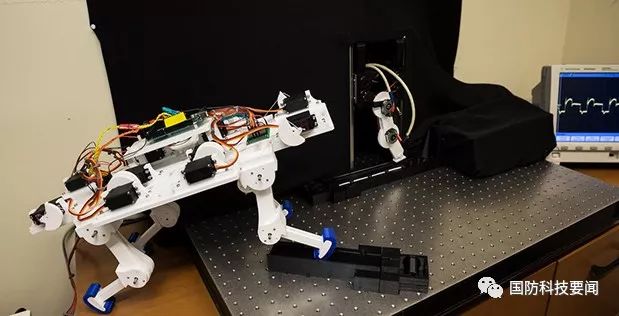
上述最新的研究成果由美国南加州大学维特比工程学院生物医学工程和生物运动学教授弗朗西斯科·巴莱罗奎瓦等人取得。其所研究的机器人肢体依赖一种生物启发的算法,只需五分钟的“非结构化玩法”(做出随意动作使机器人能够学习自身结构及其周围环境环境),即可自行学习步行任务。机器人“边做边学”的能力是机器终身学习的重大进步。当前的机器学习方法依赖于针对所有潜在场景的预编程系统,这种做法非常复杂、费力且低效。南加州大学的研究人员所做的工作表明,人工智能系统有可能从相关经验中进行学习。
四、研究意义
DARPA信息创新办公室项目经理哈瓦·西格尔曼表示,当前正处于人工智能领域的重要转型时刻。智能系统目前采用的固化训练方法将很快被能够现场学习的方法所取代。更安全、灵活、有效的人工智能系统需要能够在操作中学习并将学习内容应用于系统之前未经过训练的新环境。这些能力对于像自动驾驶汽车这样的复杂系统而言必不可少。“终身学习机器”项目研发的技术与自动驾驶汽车技术相整合,将使后者在不同条件下的驾驶行为变得更加专业,使其比人类更安全地驾驶汽车。
来源:DARPA网站/图片来自互联网
军事科学院军事科学信息研究中心 申 淼
声明:本文来自国防科技要闻,版权归作者所有。文章内容仅代表作者独立观点,不代表安全内参立场,转载目的在于传递更多信息。如有侵权,请联系 anquanneican@163.com。
